Kalman滤波时间尺度算法是时间产生和保持工作中一种常用方法,在守时实践中具有重要的实用价值。但当钟差数据异常时,会使Kalman滤波时间尺度算法中状态估计出现异常扰动,从而降低时间尺度的准确性和稳定性。因此,应当对原子钟异常数据进行实时处理。
近日,中国科学院国家授时中心时频基准实验室关于原子钟异常数据情况下改进的Kalman滤波时间尺度算法研究取得了新进展。该研究室通过引入等价协方差矩阵和自适应因子对Kalman滤波时间尺度算法进行改进。具体做法是构造等价协方差矩阵来控制测量异常值对原子钟状态估计的影响,利用统计量实时计算自适应因子的量值来控制状态预测协方差矩阵的增长,以降低原子钟异常对状态估计的影响。
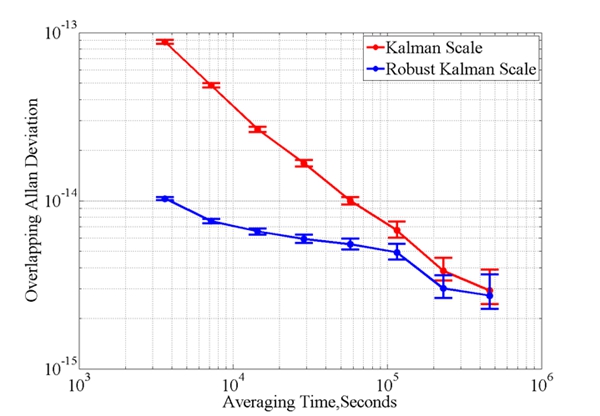
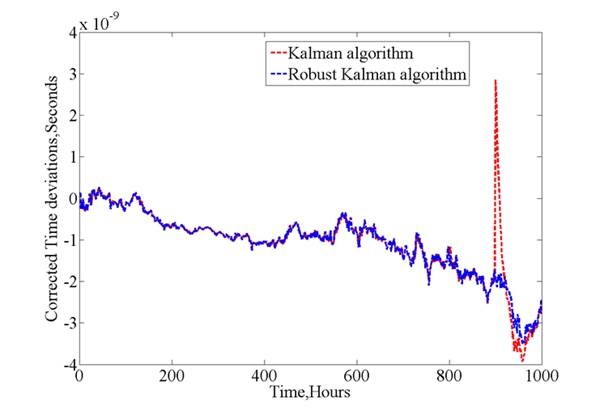
该项工作从模拟数据和实测数据两方面对原子钟数据异常情况下的Kalman滤波算法进行了分析,并与经典Kalman滤波算法进行了比较,结果表明当原子钟数据异常发生时,改进的Kalman滤波算法能有效抵制异常数据对时间尺度的影响,可以提高时间尺度的准确度和稳定度。该项研究还分析了测量噪声为非高斯噪声情况下的算法性能,比较了最小二乘阈值设置用于异常数据处理的情况,结果表明改进的Kalman滤波时间尺度优于最小二乘预处理计算时间尺度的稳定度。
审稿人在评审意见中指出,算法主要针对原子钟数据异常情况提出了一种改进的Kalman滤波时间尺度算法,模拟数据和实测数据都验证了该算法的有效性,具有重要的实用价值。
该研究得到了重大科技基础设施—长短波授时系统,国家自然科学基金,西部之光等项目的支持。研究成果以《A robust Kalman filter time scale algorithm with data anomaly》论文形式发表在 Journal of Instrumentation(JINST) 期刊上 (Journal of Instrumentation Volume 16,June 2021 JINST 16 P06032 )。
图1:基于两种Kalman滤波算法的时间尺度稳定度比较
图2:基于两种算法的原子钟改正时间偏差比较